ХОЛБОО НАВИГАЦЫН СИСТЕМ
ХОЛБОО НАВИГАЦЫН СИСТЕМ

Агаарын хөлгийн Радио электрон тоног төхөөрөмжүүд
Анхны агаарын
хөлгүүдэд холбооны хэрэгслийг тухайн нисэхийн төвийн нислэгийн удирдлага, нисэх
багийн хооронд мэдээлэл дамжуулах ойрын зайн командыг ашиглаж байсан. Дараа нь
очих газрын нислэгийн удирдлага, нисэх багийн гишүүдийн хооронд мэдээлэл
дамжуулах холын (богино долгионы) холбоо ашигласан.
Орчин үеийн
агаарын хөлөгт багийн гишүүд, хөлгийн үйлчилгээний ажилтан зорчигч нартайгаа
мэдээлэл солилцох дотор холбоо, төвийн болон өнгөрөн гарах хотуудын агаарын
байдал хот суурин газар, уул усны байдал, ойролцоо нислэг үйлдэж буй агаарын
хөлөг зэргийг тодорхойлох радио локатор нислэгийн явсан ба очих зайг
тодорхойлох, нислэгийн өндөр, хурд болон чиглэлийг өндөр нарийвчлалтай мэдээлэл
авах, автомат жолоодлогын удирдлага, буулт болон суултыг автоматаар үйлдэх зэргийг
газрын төхөөрөмж болон сансрын хиймэл дагуулуудын мэдээллийн тусламжтайгаар
удирдлагын навигац систем болгон ашиглаж байна.
Ирээдүйд
агаарын хөлгийн бүх системүүдийг сансрын мэдээллийн систем, газрын холбоо
навигац системтэй нэгтгэж, тооцоолон боловсруулах багц систем болгосноор улам
боловсронгуй болгохын төлөө олон улсын шинжлэх ухааны техникийн багууд хамтран
ажиллаж байна.
Агаарын хөлөгт ашигладаг холбооны тоног төхөөрөмжийн хэрэглээ ба ангилал
Агаарын хөлгийн хөдөлгүүр асаахаас эхлээд, дараагийн нислэг дуусаад очих
газраа зогсоод зогстол нислэгийн удирдлагуудтай, нислэгийн үеийн ойролцоох
агаарын хөлгийн нисэх багтай агаарын холбоогоор мэдээлэл солилцоно. Уг холбоо
барих үйлдэл нь
А. Ойрын зайн метрийн /vhf/ долгионы холбоо нь шуугианы өндөр хамгаалалттай,
хөндлөнгийн нөлөөлөл /ойролцоох ямар нэгэн өндөр чадалтай цахилгаан соронзон
долгион/-оос хамааралгүй цэвэрхэн мэдээлэлтэй. Мөн бага оврын антентай. Сул тал
нь мэдээлэл солилцох алслалт багатай.
Б. Холын зайн дециметрын /HF/ богино долгионы холбоо нь алсын зайн мэдээлэл
солилцоход ашигладаг, өндөр чадлын /100-450Вт/ хэд хэдэн мянган км-ын зайнд
холбоо барихад зориулагдсан. Харин хүлээн авч байгаа газарт дохионы чадал нь
тухайн үеийн агаар мандлын ионесферийн шинж чанараас нөлөөлдөг болон тусгай нарийн
хийцийн антен шаарддаг нь сул тал юм.
Радио холбооны үндэс
Серб улсын инженер, физикч
аугаа зохион бүтээгч Никола Тесла
цахилгаан соронзон долгион, соронзон талбайн үзэгдлийг нээж хувсах гүйдлийн
хөдөлгүүр, генераторыг зохион бүтээсэн ба дараа нь Оросын эрдэмтэн Александр
Степанович Попов, Шотландын иргэн Английн физикч Джеймс Клерк Максвелл нар
цахилгаан гүнзгий онолоор тайлбарлан цахилгаан дамжуулах утасгүй радио холбоог
ашиглаж болохыг нээн боловсруулсан.
GNS-530W
GPS- Global Positioning Systems
Introduction
Сүүлийн жилүүдэд хиймэл
дагуулын навигацын системийг REVO хэрэгслээр залуурдаж байна. АНУ болон ЗХУ нь
цэргийн ба компьютерийн системүүдийг хослуулан боловсруулсан бөгөөд системийг
засахдаа тусгай комиссийн багийн бүрэлдэхүүн нь дэлхийн хиймэл дагуулын
навигацын систем болох GNSS-ээс мэдээлэл авдаг. АНУ-ийн GPS систем хамгийн их
хэрэглэгддэг. Гэсэн хэдий ч ЗХУ буюу одоогоор Орос улсын Глонасс систем нь маш
тохиромжтой хүлээн авагч төхөөрөмжтэй. Хүлээн авагч нь ямар ч системийн дохиог
хүлээн авахаар үйлдвэрлэгдэж байгаа бөгөөд бусад улсуудтай хамтран системийг
илүү боловсронгуй болгох талаар яригдаж байгаа.
Үйл
ажиллагааны зарчим
Үндсэн
зарчим
Үндсэндээ бүх хиймэл
дагуулын навигац систем нь DME-ийн зарчмыг ашигладаг. Хүлээн авагч нь хиймэл
дагуулын орон зай дахь тодорхой цэгээс дамжуулсныг радио дохио болгоно. Цаг
хугацаа болон долгионы тархалт, хурдыг холын зайн хүлээн авагчийн компьютер
тооцож олдог. Хүлээн авагч дараа нь өөр хиймэл дагуулын цаг ба дохиог ашиглаж байршил
болон зайг тодорхойлно. Тооцооны зайг эхний хиймэл дагуулын радиус дээр
төвлөрсөн бөмбөрцгөөр тэмдэглэнэ. Мөн 2 дахь хиймэл дагуулын зайг
тодорхойлохдоо хүлээн авагчийн
мэдээллийг ашиглана.
Цааш нь гуравдахь хиймэл дагуулын хүрээг өгч болно. 1 ба
2дугаар хиймэл дагуулыг тойрогт элсүүлэн байршуулах боломжтой, мөн 1 ба 3 болон
2 ба 3 дугаар хиймэл дагуулыг элсүүлэн байршуулах боломжтой. Эдгээр 3н дугуй
орон зайн зөвхөн 2 цэгт л уулзана. Компьютерийн хүлээн авагч нь 3н хэмжээст цэг
дээрх дэлхийтэй хамааралтай уртраг өргөрөг, босоо хэвтээ шугам болон дэлхийн
төвийн тооцоог хийж үр дүнг харуулна.
Үйл ажиллагааны зарчмаас харахад хиймэл дагуулуудын
байршил дээрээсээ дохио дамжуулах хугацаа нь том асуудал болж байна. Дэлхий
даяар хамарч байхын тулд хиймэл дагуулууд нь ямар нэг өнцгөөр тойрог замд байх
ёстой ба дэлхийтэй холбоотой маш хурдан хөдөлж байх хэрэгтэй. Хиймэл дагуул
бүрийн тойрог зам дахь байрлал хуанлид(almanac) тэмдэглэгдэнэ. Хиймэл дагуул
бүрийн хаана байх ёстойг хүлээн авагчийн компьютер нь хуанли ашиглан тооцож
олдог. Тиймээс хиймэл дагуулын байршил буруу үед засаж болох ба энэ нь сансраас
илгээх дохиог илүү хурдан хүлээн авах боломжийг олгодог.
Үнэндээ хүлээн авагчийн
хүлээн авах хязгаар нь яг үнэн зөв биш байдаг. Үүнийг “pseudo-ranges” гэж
нэрлэх ба хиймэл дагуул тус бүрийн хүрээг илүү үнэн зөв хэмжих хэрэгтэй болдог.
Хиймэл дагуулын байрлал болон замыг тодорхойлох цэгийг “ephemeris” гэж нэрлэнэ.
Хиймэл дагууллын дамжуулах цагийг атомын цагаар тооцдог. Ephemeris бүр дээр
цагийн тохиргоо хийхдээ UTC-ийг ашиглана. Богино хугацаанд хүлээн авах нь
зардлыг бууруулдаг. Гэсэн хэдий ч 4 хиймэл дагуулын дохио ашиглан гурван бүлэг
тус бүрийн байрлалыг тооцож гаргахад байх ёстой диаграмаас зөрсөн байдаг ба энэ
алдаа нь хугацаанаас болдог байна.

GPS sub-systems
Space segment
АНУ-ийн GPS
системийг NAVSTAR гэж нэрлэх ба 24 хиймэл дагуул 3 буюу түүнээс дээш эд
ангиас бүрдэн тойрог замд гардаг. Хиймэл дагуулууд 6 өөр тойрог замд дэлхийн
гадаргуугаас дээш 20200км зайд байрладаг. Тойрог замын мэдээллийг дэлхийн эргэх
тэнхлэгийн 55 градусаар тохируулдаг. Эдгээр нь 40 цагийн турш тухайн сэгмент
дэх давтамж эсвэл PRN(pseudo- noise random numbers) гэх мэт навигацийн
мэдээллийг дамжуулдаг. Хиймэл дагуул бүр эхлээд өөр өөр код илгээдэг.
Control
segment
Хяналтын хэсэг газрын
станцуудаас тогтдог. Мастер станц бүх тооцоог хийх ба бусад газрын станц нь
хиймэл дагуул хоорондын харилцаа холбоог хангах үүрэгтэй. Дараа нь хиймэл
дагуул бүр өөрийн ephemeris цэг дээрээс хугацааны алдаануудаа дахин дамжуулна.
Мастер станц нь мөн ТУЗ-ийн шаардлагыг дамжуулна.
Ямар ч хиймэл дагуул худал
мэдээлэл дамжуулах эсвэл буруу тойрог замд байх алдаа гаргадаг ба мастер станц
нь хиймэл дагуул бүрт үйлчилдэг. Хйимэл дагуул нь мастер станц дээгүүр нисч хэд
хэдэн тойрог замд орох мэдээллээ авах ба мэдээллийг нь дамжуулах биетийн
дээгүүр мөн нисэх ёстой.
User
segment(aircraft equipment)
GPS-ийн хүлээн авагч нь
агаарын хөлгийн гадна талд холбогдсон байдаг. Hand-held төхөөрөмж нь байршлийг
нарийвчлалтай харуулах чадвартай төхөөрөмж юм. Компьютер болон програм хангамж
нь агаарын хөлгийн тоног төхөөрөмжийн цогц эд анги юм. Компьютер нь
шаардлагатай замын урт, замдаа түр зогсох цэг, газрын хурд зэргийг тооцож өгнө. Хүлээн авагч нь Almanac мэдээллийг ашиглан
хйимэл дагуулын байршлыг татаж авах ёстой. Ингэснээр навигацийн дохиог хүлээн
авах боломжтой болно. Анхны switch-ийг on болгоход хүлээн авагч нь зөв
давтамжийн дохиог хайж эхлэнэ. Almanac нь аль ч хиймэл дагуулаас авсан
мэдээллийг өөрийн компьютертоо нэг удаа ачааллах ёстой.
Almatac system нь дохио дамжуулах болон хүлээн авах чадвартай хиймэл
дагуулыг сонгоно. Pseudo-random code хиймэл дагуулаар дамжуулан өөрийн кодны
хувилбарыг үүсгэх ба энэ нь хугацааг ойролцоогоор хамгийн зөв тодорхойлсон код
байна.
Хүлээн авагч нь өөрөө 3н төрөлтэй. Multi-channel, multiplex, sequential.
Sequential хүлээн авагч нь хиймэл дагуулыг тодорхой хугацаанд түгжих,
псевдо хүрээг хэмжих, дараа нь хайх, дараагийн хиймэл дагуулыг түгжих гэх мэт
үйлдэл хийнэ.
Multiplex хүлээн авагч нь хиймэл дагуулуудын хоорондох цагийг хүлээн авах
болон тооцоолох үйлдэл гүйцэтгэнэ. Учир нь хиймэл дагуул болгоноос өөр өөр
мэдээлэл ирдэг тул тэдгээрийн мэдээллийг хооронд нь илгээх, богино хугацаанд дамжуулах,
хадгалах хэрэгтэй болдог. Хүлээн авагч нь тухайн хиймэл дагуул дээр түгжигдсэн
байх ба компьютер нь түүний дохиог олж мэдээллийг боловсруулдаг. Өөр нэг хиймэл
дагуулын дохиог олбол компьютер нь шинэ хиймэл дагуулын мэдээллийг хадгалж
аваад буцаад өмнөх мэдээлэл дээр ажиллана. Тийм учраас навигацийн мэдээллийг
аажуухнаар бэлтгэдэг.
Навигацийн мэдээллийг зөв
өгсөнөөр нисгэгч GPS ашиглан байрлал болон хугацааны үнэн зөв мэдээллийг авна.
Зарим туршилтын GPS нь
тоон товчлуурын аргаар ажилладаг ба энэ нь хөнгөн агаарын хөлөгт зориулсан LSE
системтэй байдаг. Нислэгийн удирдлагын системд бүрэн хэмжээний комьютер эсвэл
гар хяналт ашигладаг. Нислэгийн замд шаардлагатай түр зогсох цэгүүдийг 3н
хэмжээс дээр тодорхойлж GPS мэдээллэх ба шаардлагатай бол өөрчлөгдсөн чиглэлийг
шуурхай тодорхойлж өгнө. Ажиллагаа нь маш энгийн нэг л товч дарахад хангалттай
байдаг. Зураг 15.56-д хөнгөн агаарын хөлгийн ердийн GPS-ийг харуулав.
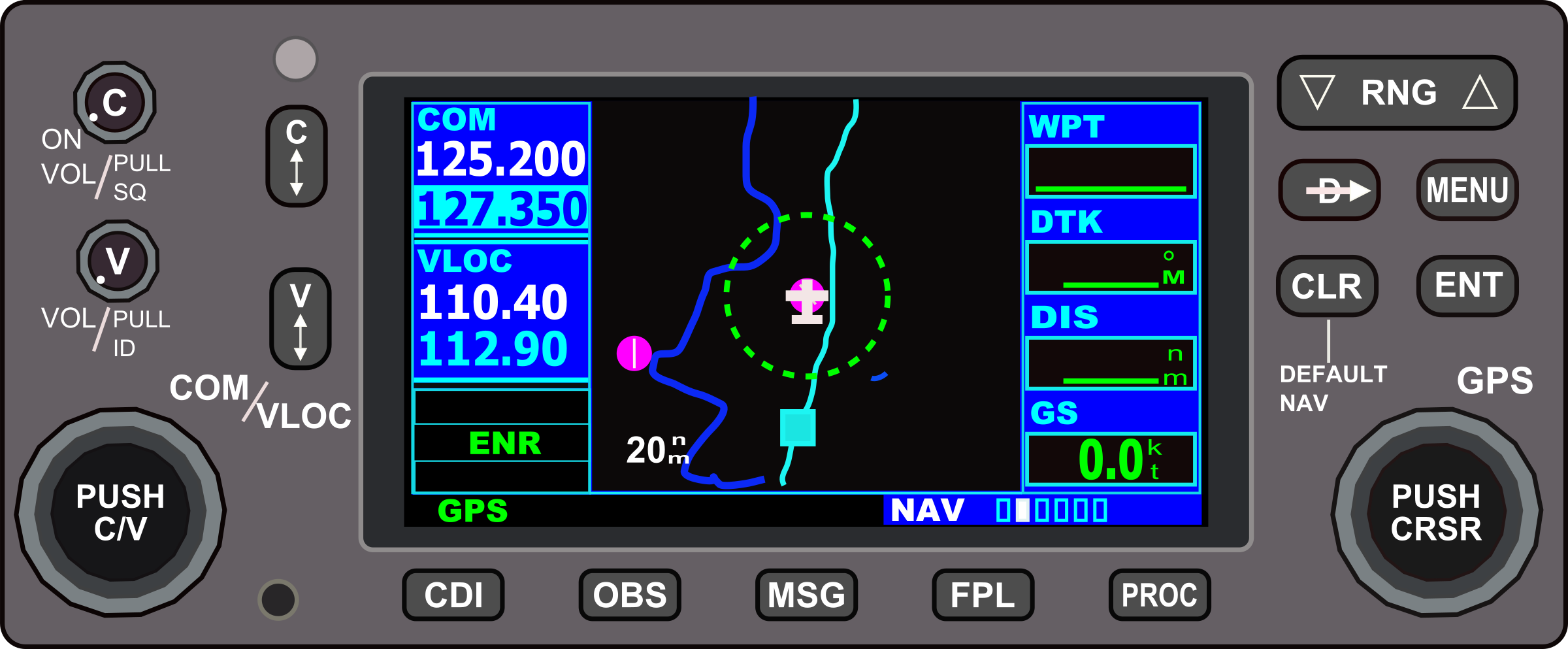
GPS нь хамгийн ойрын аэрдромыг сонгож тооцоо хийнэ. Дэлгэц
дээр явж буй байрлал, явах зай, groundspeed зэрэг мэдээллүүд гарч ирнэ. Баруун
талд нь агаарын замд бүртгэлтэй нийслэгийн замууд харагдана. Дэлгэцэн доор
товчлуураар control-дох цэснүүд байна.
GPS-ийн
алдаанууд
-
Уртраг,
өргөрөг, өндрийн бага зэргийн алдаатай хэмжилт хийдэг.
-
Horizontal
dilution of precision (HDGP) нь хэвтээ хавтгайн зайд нөлөөлдөг. Алдаатай хэмжинэ.
-
Vertical
dilution of precision (VDOP) нь босоо хавтгайн зайд нөлөөлнө. Алдаатай хэмжинэ.
-
Time
dilution of precision (TDOP) хүлээн авагчийн цаг бага зэргийн алдаатай заадаг.
-
Нэг
хиймэл дагуулын хүрээн дэх мэдээлэл нарийвчлал багатай байдаг.
Хиймэл дагуулын байрлалын алдаа
Хиймэл дагуул
бүр тойрог замдаа дэлхий, нар, сарны таталцалаар оршин тогтнодог. Тойрог замыг
компьютерийн тооцоо ашиглан урьдчилан таамаглаж болно. Харин сансрын хог, солир
гэх мэт жижиг зүйлс хиймэл дагуулын хажуугаар өнгөрөхдөө мөргөснөөр ажиллагаанд
доголдол учруулах эсвэл тойрог замд өөрчлөлт оруулж болно. Тийм учраас хиймэл
дагуулын байрлалын алдаа гардаг.
Хиймэл дагуулын хугацааны алдаа
Газрын станцаас
хиймэл дагуулд тогтмол шинэчлэлүүд хийхэд уддаг бөгөөд шинэчлэл хийхээс өмнө
хугацааны алдаа гардаг.
lonospheric Refraction(ойлт)
UHF дохиог хэвийн биш гэж үзвэл ионосфер ойлт
болгон хэрэглэнэ. Энэ нь хугаралын маш бага хэмжээний, нарийвчлалтай нуман
өнцгөөр тодорхойлогдоно.
Орчих
мандалын ойлт (Tropospheric
Refraction)
Орчих мандалд
долгионыг хугалах болон түүний тархах хүчийг сааруулах үйл явц болдог. Гэсэн
хэдий ч энэ нь зөвшөөрөгдсөн алдаанд ордог.
Хүлээн
авагчийн хэмжилтийн алдаа
Хүний хийсэн ямар ч
хэмжлэгийн төхөөхрөмж байрлалын тооцоо хийхдээ бага хэмжээний алдаа гаргадаг.
Энэ нь 0,3 метр дотор байна.
GPS-ийн
үнэн зөв байдал
Заагдсан хугацааны дотор
хэвтээ хавтгайн дагуу 300м дотор долгионыг дамжуулбал 99,99% үнэн гэж
үздэг.(30м-95%) Харин босоо хавтгайн дагуу 500м-ыг 99,99% гэж үзнэ.(56м-95%)
GLONASS
ОХУ-ын хиймэл дагуулын
навигацын системыг ГЛОНАСС гэж нэрлэдэг. Литуан гэдэг тусдаа давтамжийг
ашигладаг. 21 идэвхитэй хиймэл дагуул 600
өнцгийн байрлалтай өөр өөр тойрог замаас навигацийн мэдээлэл дамжуулна.
Бүх Глонасс хиймэл дагуулууд 19000км өндөрт 12 цагийн байрлалаар дэлхийг тойрон
ажилладаг.
European
GNSS
Европын холбооны улс
орнууд навигацын мэдээллээр хангах өөрийн бие даасан хиймэл дагуулын систем
дээр ажилладаг. Тэр нь АНУ-ын GPS систем. Мөн экватор дээр geostationary
байгуулан тэр станцаасаа мэдээлэл хүлээн авах зорилго таьин ажиллаж байгаа ба
энэ эь бэлтгэл шатандаа явж байгаа. Энэ систем нь атомын цагыг ашиглах юм.
Хүлээн авсан сигналаа “pseudo-lite” гэж нэрлэх ба энэ станцыг ашигласнаар маш
удаан хугацаанд тогтвортой дамжуулалт хийх боломжтой болох юм.


ta bugdiin tavigdaj baigaa medeelel oyutan bidend ih hereg bolj baigaa shvv urgeljluuleed idevhitei shine shine edeelel oruulaarai bayrllaaa :)
ReplyDelete